top of page
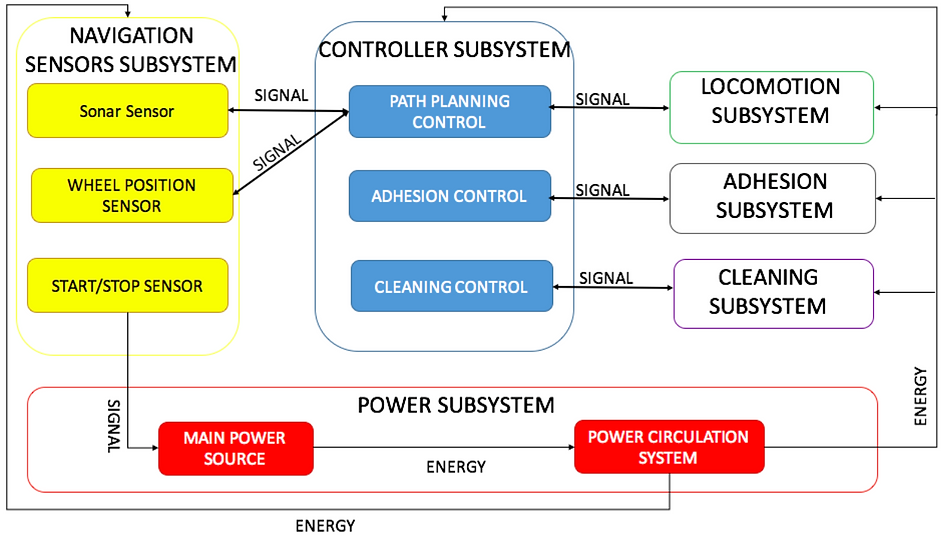
Functional Architecture
After placing the Robot on the window the fans will ramp to the desire pwm to allow for optimal adherence. PID will be in control in order to prevent the robot from slipping. Afterwards PWM will disengage, the ultrasonic sensor will read the distance to the barrier, and process that information to know when how far to go when implementing path planning. After a desired number of cleaning paths the robot will stop at the barrier, actuate the cleaning system up and cross the barrier.
bottom of page